
Tout d’abord, la composition du système
1. Le système de détection continue de surcharge sur autoroute est généralement composé du système de collecte et d'analyse des informations sur la surcharge des véhicules de fret en amont et de la gestion des informations sur la surcharge des véhicules de fret en aval.
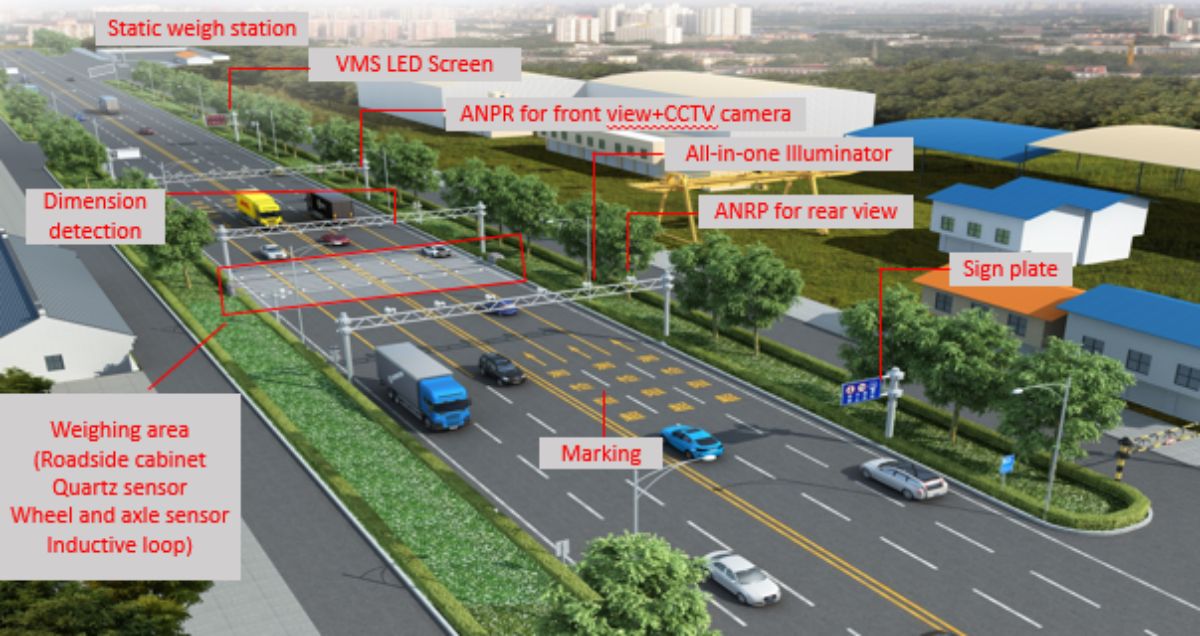
2. Le système de collecte et d'analyse des informations sur la surcharge des véhicules de fret frontaux est généralement composé d'un équipement de pesage continu, d'un équipement de détection de la taille du profil du véhicule, d'un équipement de reconnaissance et de capture des plaques d'immatriculation, d'un détecteur de véhicule, d'un équipement de vidéosurveillance, d'un équipement de diffusion d'informations, de panneaux de signalisation, d'installations d'alimentation électrique et de protection contre la foudre, d'armoires de commande sur site, d'équipements de collecte, de traitement et de transmission réseau d'informations, d'une zone de pesage et de détection continus, d'un marquage des panneaux de signalisation et des installations de soutien associées.
3. La plate-forme de gestion des informations sur la surcharge des véhicules de fret (y compris l'application directe) est généralement composée de plates-formes de gestion des informations sur la surcharge des comtés (districts), des municipalités et des provinces (y compris l'application directe).
2. Exigences fonctionnelles
1. Exigences fonctionnelles pour les équipements de pesage continus
1.1 Plage de vitesse de fonctionnement
La plage de vitesse de l'équipement de pesage non-stop est de (0,5 à 100) km/h pour que les véhicules de fret traversent la zone de détection non-stop.
1.2 Niveau de précision du poids total du véhicule
(1) L'erreur maximale admissible de la pesée du poids total du véhicule et de la cargaison dans la plage de vitesse de fonctionnement autorisée de l'équipement de pesage sans arrêt ne doit pas être inférieure aux dispositions et exigences des niveaux de précision 5 et 10 du JJG 907 « Règlement sur la vérification des appareils de pesage automatique des véhicules routiers dynamiques » (tableau 2-1).
Tableau 2-1 Erreur maximale admissible lors du pesage dynamique du poids total du véhicule
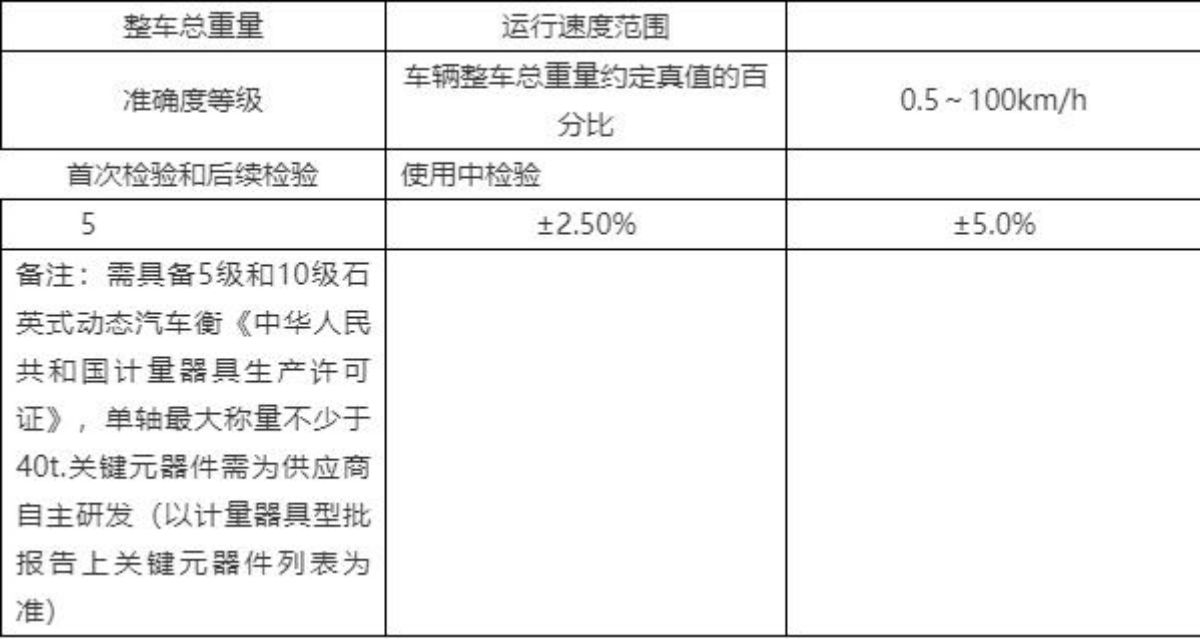
(2) Lorsque le véhicule de transport de marchandises traverse la zone de détection de pesage continu avec des comportements de conduite anormaux tels que des accélérations et des décélérations fréquentes, des sauts d'échelle, des arrêts, des virages en S, des croisements, des conduites sous pression, des marches arrière ou des arrêts-départs dans un court laps de temps, le niveau de précision du poids total du véhicule de l'équipement de pesage continu ne doit pas être inférieur aux dispositions et exigences du tableau 2-1. (Les voies de circulation et la conduite en sens inverse sont importantes).
1.3 La cellule de charge utilisée dans l'équipement de pesage non-stop doit être conforme aux dispositions et exigences de la norme GB/T7551 « Cellule de charge », la durée de vie doit être ≥ 50 millions d'essieux et le niveau de protection de la cellule de charge utilisée dans le pesage non-stop ne doit pas être inférieur à IP68.
1.4 La durée de fonctionnement moyenne sans problème de l'équipement de pesage sans interruption ne doit pas être inférieure à 4 000 heures, la période de garantie des composants clés ne doit pas être inférieure à 2 ans et la durée de vie ne doit pas être inférieure à 5 ans.
1.5 Exigences de protection contre les coupures de courant
(1) Lorsque l'alimentation est coupée, l'équipement de pesage sans interruption doit être capable de stocker automatiquement les paramètres actuellement définis et les informations de pesage, et la durée de stockage ne doit pas être inférieure à 72 heures.
(2) En cas de panne de courant, la durée de fonctionnement de l'horloge interne de l'équipement de pesage sans interruption ne doit pas être inférieure à 72 jours.
1.6 Exigences relatives au traitement anticorrosion
Les parties métalliques exposées des équipements de pesage continu doivent être traitées avec un traitement anticorrosion conformément aux dispositions pertinentes de la norme GB/T18226 « Conditions techniques pour l'anticorrosion des composants en acier dans l'ingénierie de la circulation routière ».
1.7 L'erreur de mesure de la vitesse du détecteur de véhicule de l'équipement de pesage continu doit être ≤± 1 km/h et la précision de la détection du flux de trafic doit être ≥ 99 %.
1.8 Les exigences techniques applicables aux séparateurs de véhicules pour les équipements de pesage continu sont les suivantes :
(1) La précision de détection du nombre d'axes doit être ≥ 98 %.
(2) L'erreur de détection de l'espacement des arbres doit être ≤± 10 cm.
(3) La précision de la classification des véhicules doit être ≥ 95 %.
(4) Le taux de reconnaissance inter-canaux doit être ≥ 98 %.
1.9 La plage applicable de température de l'environnement de travail doit être comprise entre -20 °C et +80 °C, et les indicateurs techniques de résistance à l'humidité environnementale doivent être conformes aux réglementations et exigences pertinentes des équipements mécaniques et électriques extérieurs de JT/T817 « Exigences techniques générales et méthodes d'essai pour les équipements de systèmes électromécaniques routiers ».
1.10 Des mesures de protection contre la pluie et la poussière doivent être prises et le niveau de protection doit être conforme aux dispositions et aux exigences de la norme JT/T817.

2. Exigences fonctionnelles pour les équipements d'essai de la taille des profils de véhicules
2.1 Lorsqu'un véhicule de transport traverse la zone de détection de pesage continue à une vitesse de (0,5 à 100) km/h, il doit être capable de détecter automatiquement et rapidement en temps réel ses dimensions géométriques et le modèle 3D de sa longueur, largeur et hauteur, et de générer des résultats d'identification corrects. Le temps de réponse ne doit pas être inférieur à 30 ms, et le temps nécessaire pour effectuer une détection et générer un résultat ne doit pas dépasser 5 s.
2.2 La plage de mesure géométrique de la longueur, de la largeur et de la hauteur du véhicule de transport de marchandises doit répondre aux exigences du tableau 2-2.
Tableau 2-2 Plage de mesure de l'équipement de test de la taille du profil du véhicule
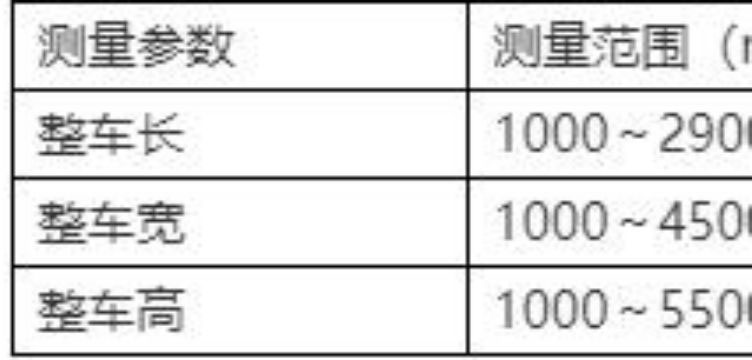
2.3 La résolution de mesure des dimensions géométriques de la longueur, de la largeur et de la hauteur du véhicule de fret ne dépasse pas 1 mm, et l'erreur de mesure de l'équipement de détection de la taille du contour du véhicule doit répondre aux exigences suivantes dans la plage de 1 à 100 km/vitesse de fonctionnement normale : (en termes de vitesse de fonctionnement, elle doit être cohérente avec les exigences de l'équipement de pesage dynamique précédent).
(1) Erreur de longueur ≤ ± 500 mm ;
(2) Erreur de largeur ≤ ± 100 mm ;
(3) L'erreur de hauteur ≤± 50 mm.
2.4 La fréquence de détection du point laser de l'équipement de test de la taille du profil du véhicule doit être ≥ 1 kHz, et il doit avoir 9 types de modèles de véhicules et des fonctions de détection de vitesse du véhicule spécifiées dans la norme GB1589 relative aux véhicules à moteur « Dimensions du contour, charge par essieu et limites de qualité des automobiles, remorques et trains automobiles ».
2.5 Il doit avoir les fonctions de véhicules de fret parallèles, de jugement de l'état de conduite en S, de blindage en matériau noir et de détection de la taille géométrique du profil du véhicule de fret en matériau à haute réflectivité.
2.6. La classification des modèles de véhicules de transport de marchandises doit inclure le volume de trafic, la vitesse de localisation, la distance temporelle avant, le pourcentage de véhicules suivis, l'espacement avant et les fonctions de détection d'occupation temporelle. La précision de classification des modèles de véhicules de transport de marchandises doit être ≥ 95 %.
2.7 La plage applicable de température de l'environnement de travail doit être comprise entre -20 °C et +55 °C, et les indicateurs techniques de résistance à l'humidité environnementale doivent être conformes aux réglementations et exigences pertinentes des équipements mécaniques et électriques extérieurs de JT/T817 « Exigences techniques générales et méthodes d'essai pour les équipements de systèmes électromécaniques routiers ».
2.8 L'équipement de test de la taille du profil du véhicule au laser doit être installé avec un portique doté d'un canal de maintenance
2.9 Le niveau de protection de l'équipement de test de la taille du profil du véhicule ne doit pas être inférieur à IP67.
3. Exigences fonctionnelles pour les équipements de reconnaissance et de capture des plaques d'immatriculation
3.1 Les exigences fonctionnelles des équipements de reconnaissance et de capture des plaques d'immatriculation doivent être conformes aux dispositions et exigences pertinentes de la norme GB/T 28649 « Système d'identification automatique des plaques d'immatriculation des véhicules à moteur ».
3.2 L'équipement de reconnaissance et de capture des plaques d'immatriculation doit être équipé d'un feu de remplissage ou d'un feu clignotant, qui doit pouvoir capturer clairement le numéro du véhicule traversant la zone de détection de pesée continue dans toutes les conditions météorologiques et produire le résultat d'identification correct.
3.3 L'équipement de reconnaissance et de capture des plaques d'immatriculation doit avoir une précision de reconnaissance des plaques d'immatriculation ≥ 99 % pendant la journée et une précision de reconnaissance des plaques d'immatriculation ≥ 95 % la nuit, et le temps de reconnaissance ne doit pas dépasser 300 ms.
3.4 L'image de la plaque d'immatriculation du véhicule de fret collectée doit être clairement affichée au format JPG pleine largeur, et le résultat de la reconnaissance doit inclure le temps de reconnaissance, la couleur de la plaque d'immatriculation, etc.
3.5 Les pixels de capture d'image de reconnaissance de plaque d'immatriculation ne doivent pas être inférieurs à 5 millions, les autres pixels de capture d'image ne doivent pas être inférieurs à 3 millions, les véhicules de fret traversant la zone de détection de pesée non-stop doivent capturer l'avant du véhicule, les deux côtés du véhicule et l'arrière du véhicule un total d'au moins 4 images haute définition.
3.6 Selon les informations de l'image haute définition avant, la zone de la plaque d'immatriculation du véhicule de fret, les caractéristiques de l'avant et de la cabine, la couleur de l'avant, etc., doivent pouvoir distinguer clairement le nombre d'essieux, la couleur de la carrosserie et la situation de base des marchandises transportées selon les informations de l'image haute définition sur le côté du véhicule ; selon les informations de l'image haute définition de l'arrière du véhicule, le numéro de la plaque d'immatriculation arrière, la couleur de la carrosserie et d'autres informations peuvent être distingués.
3.7 Chaque image doit être superposée avec des informations telles que la date de détection, l'heure du test, le lieu du test, le poids total du véhicule et de la cargaison, les dimensions du véhicule, le numéro de l'équipement d'analyse d'image, la lutte contre la contrefaçon et d'autres informations.
3.8 La bande passante du canal de transmission des informations d'image capturées ne doit pas être inférieure à 10 Mbps.
3.9 Il doit disposer de fonctions d'auto-vérification des défauts tels qu'une communication anormale et une panne de courant.
3.10 La plage applicable de température de l'environnement de travail doit être comprise entre -20 °C et +55 °C, et les indicateurs techniques de résistance à l'humidité environnementale doivent être conformes aux réglementations et exigences pertinentes des équipements mécaniques et électriques extérieurs de JT/T817 « Exigences techniques générales et méthodes d'essai pour les équipements de systèmes électromécaniques routiers ».
3.11 Le niveau de protection des équipements de reconnaissance et de capture des plaques d'immatriculation ne doit pas être inférieur à IP67.
4 Exigences fonctionnelles de l'équipement de vidéosurveillance
4.1 La caméra de surveillance vidéo doit avoir une fonction de caméra infrarouge jour et nuit, et doit être capable de détecter en continu la zone de la fonction de caméra panoramique et d'enregistrer au moins 10 secondes de données vidéo de collecte de preuves de surcharge illégale de véhicules de fret.
4.2 Il doit avoir les fonctions d'autodiagnostic, d'étalonnage du champ de vision et de compensation automatique.
4.3 Les images vidéo médico-légales ne doivent pas comporter moins de 3 millions de pixels et doivent être claires et stables.
4.4 Il doit avoir la fonction de rotation et de zoom, et la rotation horizontale et verticale et le zoom de l'objectif peuvent être effectués selon la commande de contrôle.
4.5 Il doit avoir pour fonction de nettoyer et d'éliminer les feux de brouillard de pluie et de gel, et doit être capable de nettoyer, de chauffer et de dégivrer le couvercle de protection à temps.
4.6 Les images vidéo médico-légales doivent être transmises en temps réel à la plateforme de gestion des informations de surcharge et d'application directe au niveau du comté (de la ville).
4.7 L'équipement de vidéosurveillance et les autres indicateurs techniques de ses accessoires doivent être conformes aux dispositions et exigences pertinentes de la norme GA/T995.
4.8 La plage applicable de température de l'environnement de travail doit être comprise entre -20 °C et +55 °C, et les indicateurs techniques de résistance à l'humidité environnementale doivent être conformes aux réglementations et exigences pertinentes des équipements mécaniques et électriques extérieurs de JT/T817 « Exigences techniques générales et méthodes d'essai pour les équipements de systèmes électromécaniques routiers ».
5 Exigences fonctionnelles pour les équipements de publication d'informations
5.1 Il devrait être possible de fournir des informations en temps réel sur la surcharge du véhicule au conducteur du véhicule en surcharge illégale.
5.2 Il devrait être capable de publier et d'afficher des informations telles que l'alternance et le défilement du texte.
5.3 Les principaux indicateurs fonctionnels et indicateurs techniques des panneaux d'information variables à LED pour autoroutes doivent être conformes aux dispositions et exigences pertinentes de la norme GB/T23828 « Panneaux d'information variables à LED pour autoroutes ».
5.4 Écran d'affichage LED à portique double colonne pour panneaux d'information variables pour autoroutes. Espacement des pixels : 10 mm, 16 mm et 25 mm. La surface d'affichage est respectivement de 10 mètres carrés pour les panneaux à quatre et six voies. Le format d'affichage est d'une ligne et de 14 colonnes.
5.5 L'espacement des pixels du panneau d'information variable LED monocolonne est réglable : 10 mm, 16 mm et 25 mm. La taille de l'écran est de 6 mètres carrés et 11 mètres carrés. Le format d'affichage est de 4 lignes et 9 colonnes.
5.6 La conception et l'installation des panneaux d'information variables à LED pour autoroutes ainsi que la distance de reconnaissance visuelle doivent pleinement tenir compte de la vitesse réelle et des besoins de reconnaissance visuelle des véhicules de fret sur le tronçon routier, et répondre aux dispositions et exigences pertinentes de la norme GB/T23828 « Panneaux d'information variables à LED pour autoroutes ».
6 exigences relatives à la configuration des panneaux de signalisation
6.1 Installer un panneau de signalisation pour entrer dans la « zone de pesage et de détection non-stop » à une distance d'au moins 200 mètres devant la zone de détection de pesage non-stop.
6.2 Installer un panneau de signalisation « interdiction de changer de voie » à au moins 150 mètres devant la zone de détection de pesée continue.
6.3 Installer un panneau de signalisation « Lever l'interdiction de changement de voie » à une distance d'au moins 200 mètres derrière la zone de détection de pesée continue.
6.4 L'installation de panneaux de signalisation dans la zone de détection de pesée continue doit être conforme à la conception et aux exigences de la norme GB5768 « Panneaux et marquages routiers ».
7. Exigences relatives aux équipements d'alimentation électrique et à la mise à la terre de la protection contre la foudre
7.1 Le système de collecte d'informations sur les surcharges et d'analyse médico-légale doit être équipé de lignes d'alimentation électrique stables et fiables, qui doivent être capables de répondre aux exigences d'un fonctionnement ininterrompu de l'alimentation électrique 24 heures sur 24.
7.2 Les mesures de protection nécessaires contre la foudre et les surtensions doivent être prises pour l'interface d'alimentation électrique et l'interface de contrôle du système de collecte d'informations sur les surcharges et d'analyse médico-légale et des composants associés, et les mesures de protection doivent être conformes aux dispositions et exigences pertinentes du JT/T817 « Exigences techniques générales et méthodes d'essai pour les équipements du système électromécanique routier ».
7.3 Le système de collecte d'informations sur les surcharges et d'analyse médico-légale doit adopter une méthode de mise à la terre à point unique à proximité, et la méthode de mise à la terre parallèle CC doit être adoptée.
7.4 La protection contre la foudre et la résistance électrique de l'équipement de collecte d'informations sur les surcharges et d'analyse médico-légale doivent être ≤ 10 Ω, et la résistance de mise à la terre de protection doit être ≤ 4 Ω.
8 Exigences fonctionnelles de l'armoire de commande de terrain

8.1 L'armoire de commande sur site, équipée du système de collecte et d'analyse des informations de surcharge, doit pouvoir stocker les processeurs d'acquisition de données, les détecteurs de véhicules, les commutateurs réseau et autres équipements. Elle doit pouvoir télécharger les informations de surcharge des camions vers la plateforme d'application directe administrative complète de la circulation du Centre d'information du ministère provincial des Transports, et les transmettre en temps réel au panneau d'information variable à LED de l'autoroute pour diffusion et affichage.
8.2 L'armoire de commande doit être conçue avec un joint de châssis à double couche, qui peut efficacement empêcher la poussière et la pluie, et dispose d'un système de contrôle de température indépendant.
8.3 L'armoire de commande doit être conçue avec des fentes pour faciliter l'extension des fonctions.
8.4 L'armoire de commande doit être équipée d'un équipement de protection de sécurité des données pour éviter la fuite des données de détection de dépassement de limite.
9. Exigences relatives à la mise en place de zones de pesage continu pour les surcharges routières
9.1 La zone de détection de pesée non-stop est composée du support d'équipement de pesée non-stop (capteur à cristal de quartz) et de ses sections de guidage aux extrémités avant et arrière (selon la surface de la route durcie de 30 mètres à l'avant et 15 mètres à l'arrière) (Figure 2-1).

Figure 2-1 Schéma de principe de la zone de pesage non-stop
9.2 L'emplacement de la zone de pesage et d'essai en continu ne doit pas être plat, le rayon de courbure longitudinale doit être faible, la distance de visibilité doit être réduite, et les longues descentes et autres sections de route doivent être respectées. Les indicateurs linéaires doivent être conformes à la norme ASTM E1318 « Spécification standard pour les systèmes de pesage en mouvement (WIM) sur autoroute, exigences utilisateur et méthodes d'essai ». Les exigences spécifiques sont les suivantes :
(1) Le rayon de braquage de l'axe central de la route de la section de guidage de 60 m et de la section de guidage arrière de 30 m dans la zone de détection de pesée non-stop doit être ≥ 1,7 km.
(2) La pente longitudinale de la surface de la route dans la section de guidage avant de 60 m et la section de guidage arrière de 30 m dans la zone de détection de pesée non-stop doit être ≤ 2 %.
(3) La valeur de pente transversale de la chaussée i de la section de route de guidage avant de 60 m et de la section de route de guidage arrière de 30 m de la zone de détection de pesée non-stop doit être égale à 1 % ≤ i ≤ 2 %.
(4) Il ne doit y avoir aucun obstacle bloquant la ligne de vue du conducteur dans la section de route de guidage de 150 m avant la zone de détection de pesée continue.
(5) La distance entre l'emplacement de la zone de pesage et de détection sans interruption et l'entrée et la sortie du tunnel routier sur le même tronçon de route ne doit pas être inférieure à 2 km et ne doit pas être inférieure à 1 km.
(6) L'erreur horizontale de la connexion entre le capteur et la surface de la route n'est pas supérieure à 0,1 mm
9.3 Afin de garantir l'exactitude des données de pesée non-stop et la sécurité de conduite, l'isolement de la voie de circulation de la section de route de guidage avant de 60 m et de la section de route de guidage arrière de 30 m de la zone de détection de pesée non-stop doit être isolé par une ligne continue.
9.4 Zone de pesage et d'essais en continu pour guider la construction des tronçons routiers
(1) La chaussée de la section de route de guidage doit être stable et le coefficient de frottement de la chaussée doit répondre aux exigences de conception de la section de route.
(2) La surface de la chaussée du tronçon de route de guidage doit être lisse et compacte. La chaussée en asphalte ne doit présenter ni ornières, ni nids-de-poule, ni affaissements, ni congestion, ni fissures, ni fissures de réseau, ni renflements. La chaussée en ciment ne doit présenter ni plaques décalées, ni ruptures, ni affaissements, ni accumulation de boue, ni autres pathologies. La planéité des chaussées en béton de ciment et en béton bitumineux doit être conforme aux dispositions et exigences de la norme JTGF80-1 « Normes d'inspection et d'évaluation de la qualité de l'ingénierie routière ».
(3) La largeur de la surface de la route du tronçon de route de guidage doit pouvoir supporter le passage normal du véhicule de fret le plus large dans la plage de pesée.
(4) La ligne centrale de la chaussée dans la zone de pesage et de test non-stop doit être isolée par des lignes continues doubles jaunes (jaune simple) et la ligne de démarcation de la voie doit être isolée par des lignes continues blanches.
3. Exigences relatives au protocole d'interface et au format des données
Le protocole d'interface et le format de données du système de détection continue de surcharge des autoroutes doivent être conformes aux dispositions et exigences pertinentes du « Plan de conception technique d'application directe administrative complète de la circulation du Fujian » afin de garantir l'interconnexion et le partage d'informations entre les plates-formes de gestion des informations de surcharge du comté (district), de la municipalité et de la province (y compris l'application directe).

Enviko Technology Co., Ltd.
E-mail: info@enviko-tech.com
https://www.envikotech.com
Bureau de Chengdu : n° 2004, unité 1, bâtiment 2, n° 158, rue Tianfu 4, zone de haute technologie, Chengdu
Bureau de Hong Kong : 8e étage, Cheung Wang Building, 251 San Wui Street, Hong Kong
Usine : Bâtiment 36, zone industrielle de Jinjialin, ville de Mianyang, province du Sichuan
Date de publication : 25 janvier 2024




